Home /
Expert Answers /
Electrical Engineering /
2-longitudinal-controller-using-pole-placement-assume-that-linearized-longitudinal-dynamics-in-the-pa983
(Solved): 2 Longitudinal Controller Using Pole Placement Assume that linearized longitudinal dynamics in the ...
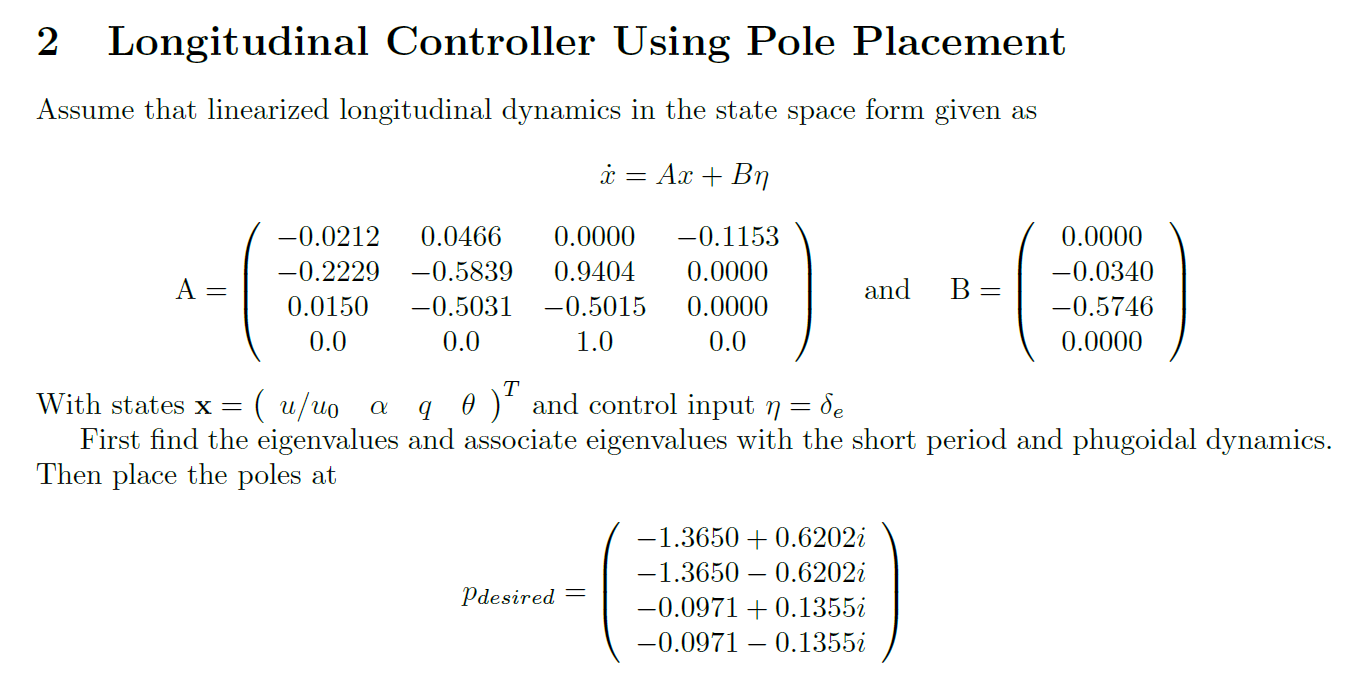
2 Longitudinal Controller Using Pole Placement Assume that linearized longitudinal dynamics in the state space form given as x = Ax + Bn 0.0000 -0.1153 0.0000 -0.0212 0.0466 -0.2229 -0.5839 0.9404 0.0150 -0.5031 -0.5015 0.0 1.0 0.0000 -0.0340 -0.5746 = and B = 0.0000 0.0 0.0 0.0000 T With states x = (u/uo a 9 e) and control input n = = ?? First find the eigenvalues and associate eigenvalues with the short period and phugoidal dynamics. Then place the poles at -1.3650 +0.6202i Pdesired= -1.3650-0.6202i -0.0971 +0.1355i -0.0971 -0.1355i