Home /
Expert Answers /
Electrical Engineering /
2b-the-transfer-function-of-depth-control-system-of-a-submersible-vehicle-is-given-by-g-p-s-9-5-pa822
(Solved): 2b The transfer function of depth control system of a submersible vehicle is given by G_(p)(s)=(9.5) ...
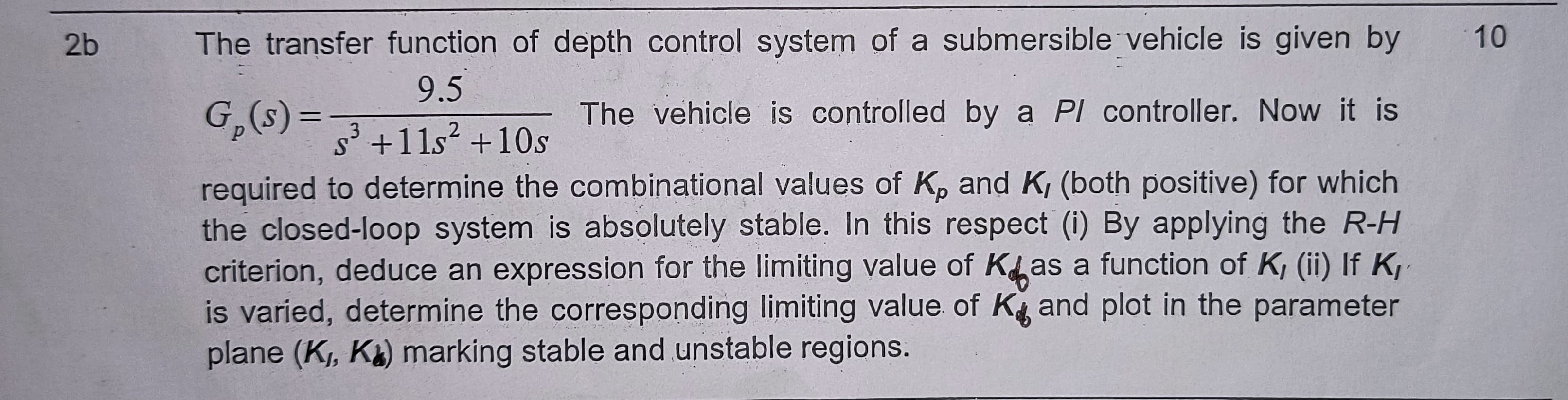
2b The transfer function of depth control system of a submersible vehicle is given by
G_(p)(s)=(9.5)/(s^(3)+11s^(2)+10s) The vehicle is controlled by a PI controller. Now it is
required to determine the combinational values of K_(p) and K_(I) (both positive) for which
the closed-loop system is absolutely stable. In this respect (i) By applying the R-H
criterion, deduce an expression for the limiting value of K_(d) as a function of K_(I) (ii) If K_(I).
is varied, determine the corresponding limiting value of K_(d) and plot in the parameter
plane (K_(f),K_(d)) marking stable and unstable regions.