Home /
Expert Answers /
Computer Science /
a-body-coordinate-frame-b-oxyz-that-is-orginally-coincident-with-global-coordinate-frame-g-oxyz-pa664
(Solved): A body coordinate frame B(oxyz), that is orginally coincident with global coordinate frame G(OXYZ), ...
A body coordinate frame B(oxyz), that is orginally coincident with global coordinate frame G(OXYZ), rotates 45 degrees about the x-axis, and then the origin of the body feame translates to (X,Y,Z) = (2,2,0).
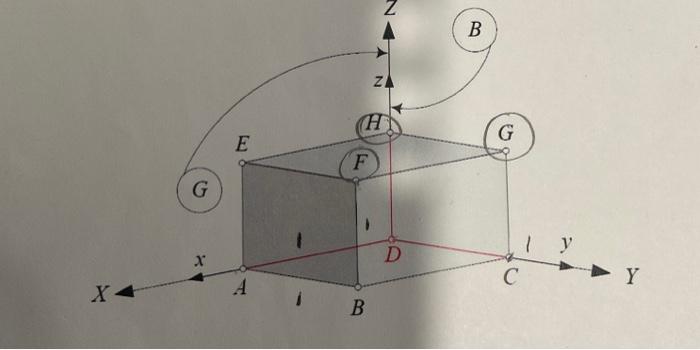
a) What is the homogeneous transformation matrix GTB
b) What is the matrix representation of the global position Gr, given Br= [x,y,z]T
c) Given the cubic in the figure below woth edge length pf 1, what are the global coordinates of corner points F, G, and H after the transformation?