Home /
Expert Answers /
Advanced Math /
consider-a-spherical-pendulum-shown-in-figure-1-the-length-of-the-pendulum-rod-is-constant-and-is-e-pa120
(Solved): Consider a spherical pendulum shown in Figure 1. The length of the pendulum rod is constant and is e ...
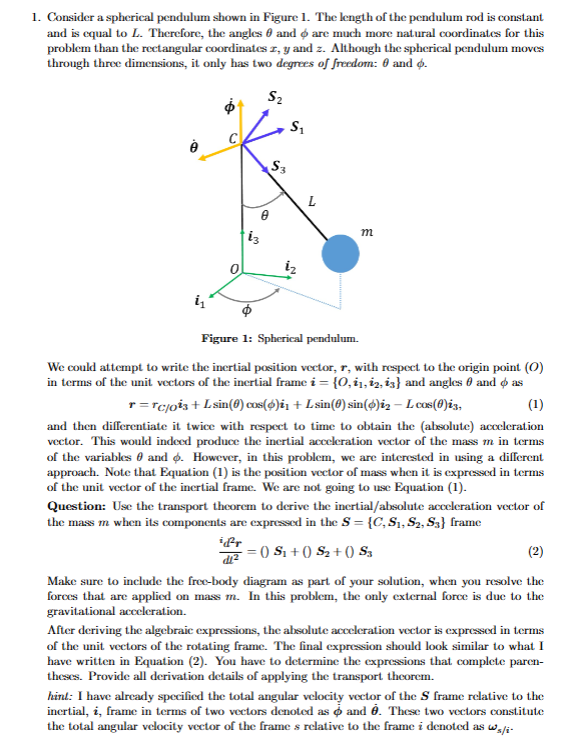
Consider a spherical pendulum shown in Figure 1. The length of the pendulum rod is constant
and is equal to L. Therefore, the angles \theta and \phi are much more natural coordinates for this
problem than the rectangular coordinates x,y and z. Although the spherical pendulum moves
through three dimensions, it only has two degrees of freedom: \theta and \phi .
Figure 1: Spherical pendulum.
We could attempt to write the inertial position vector, rO i={O,i_(1),i_(2),i_(3)} and angles \theta and \phi as
r=r_((C)/(O))i_(3)+Lsin(\theta )cos(\phi )i_(1)+Lsin(\theta )sin(\phi )i_(2)-Lcos(\theta )i_(3)
and then differentiate it twice with respect to time to obtain the (absolute) acceleration
vector. This would indeed produce the inertial acceleration vector of the mass m in terms
of the variables \theta and \phi . However, in this problem, we are interested in using a different
approach. Note that Equation (1) is the position vector of mass when it is expressed in terms
of the unit vector of the inertial frame. We are not going to use Equation (1).
Question: Use the transport theorem to derive the inertia(l)/(a)bsolute acceleration vector of
the mass m when its components are expressed in the S={C,S_(1),S_(2),S_(3)} frame
(id^(2)r)/(dt^(2))=0S_(1)+0S_(2)+0S_(3)
Make sure to include the free-body diagram as part of your solution, when you resolve the
forces that are applied on mass m. In this problem, the only external force is due to the
gravitational acceleration.
After deriving the algebraic expressions, the ahsolute acceleration vector is expressed in terms
of the unit vectors of the rotating frame. The final expression should look similar to what I
have written in Equation (2). You have to determine the expressions that complete paren-
theses. Provide all derivation details of applying the transport theorem.
hint: I have already specified the total angular velocity vector of the S frame relative to the
inertial, i, frame in terms of two vectors denoted as \phi ^(˙) and \theta ^(˙). These two vectors constitute
the total angular velocity vector of the frame s relative to the frame i denoted as \omega _((s)/(i)) -