Home /
Expert Answers /
Mechanical Engineering /
figure-1-nonlinear-mass-spring-damper-system-the-variables-x1-t-and-x2-t-represent-the-po-pa549
(Solved): Figure 1: Nonlinear mass-spring-damper system The variables x1(t) and x2(t) represent the po ...
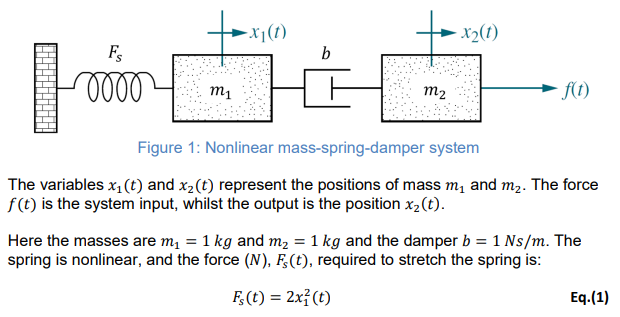
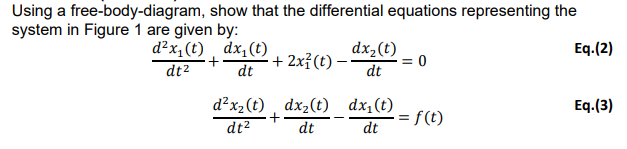
Figure 1: Nonlinear mass-spring-damper system The variables and represent the positions of mass and . The force is the system input, whilst the output is the position . Here the masses are and and the damper . The spring is nonlinear, and the force , required to stretch the spring is:
Using a free-body-diagram, show that the differential equations representing the system in Figure 1 are given by: