Home /
Expert Answers /
Mechanical Engineering /
figure-6-1-q-6-c-14-marks-the-surgical-manipulator-in-figure-6-1-is-being-used-in-a-robot-guided-pa360
(Solved): Figure 6.1 Q 6(c) [14 Marks] The surgical manipulator in Figure 6.1 is being used in a robot guided ...
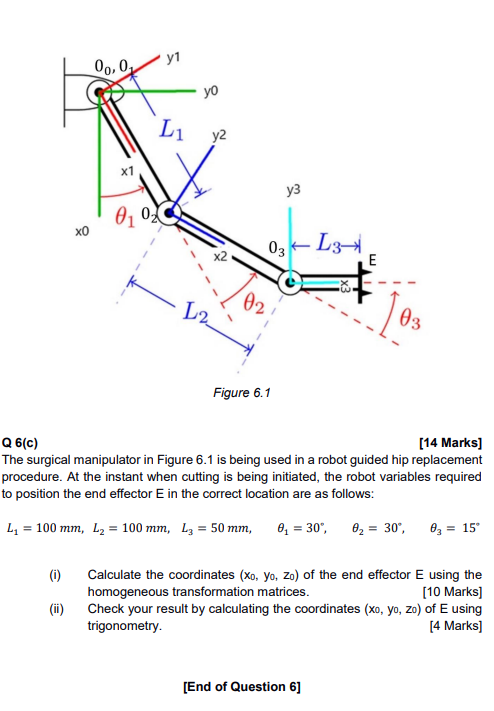
Figure 6.1 Q 6(c) [14 Marks] The surgical manipulator in Figure 6.1 is being used in a robot guided hip replacement procedure. At the instant when cutting is being initiated, the robot variables required to position the end effector E in the correct location are as follows:
L_(1)=100mm,L_(2)=100mm,L_(3)=50mm,\theta _(1)=30\deg ,\theta _(2)=30\deg ,\theta _(3)=15\deg (i) Calculate the coordinates (
x_(0),y_(0),z_(0)) of the end effector E using the homogeneous transformation matrices. [10 Marks] (ii) Check your result by calculating the coordinates (
x_(0),y_(0),z_(0)) of E using trigonometry.