Home /
Expert Answers /
Electrical Engineering /
given-a-unity-feedback-system-with-g-s-s-9-s-6-s-10-k-s-3-andh-s-1-a-evaluate-the-pe-pa996
(Solved): Given a unity feedback system with: G(s)=(s+9)(s+6)(s+10)K(s+3);andH(s)=1 a) Evaluate the pe ...
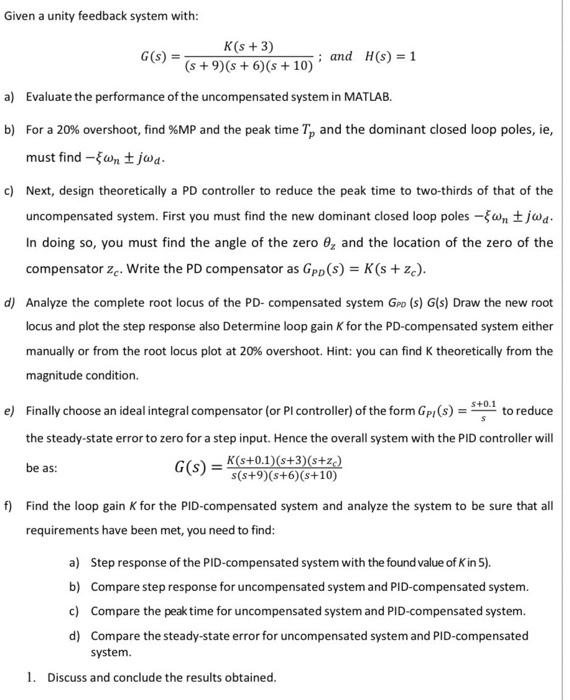
Given a unity feedback system with: a) Evaluate the performance of the uncompensated system in MATLAB. b) For a overshoot, find and the peak time and the dominant closed loop poles, ie, must find . c) Next, design theoretically a PD controller to reduce the peak time to two-thirds of that of the uncompensated system. First you must find the new dominant closed loop poles . In doing so, you must find the angle of the zero and the location of the zero of the compensator . Write the PD compensator as . d) Analyze the complete root locus of the PD-compensated system Draw the new root locus and plot the step response also Determine loop gain for the PD-compensated system either manually or from the root locus plot at overshoot. Hint: you can find theoretically from the magnitude condition. e) Finally choose an ideal integral compensator (or PI controller) of the form to reduce the steady-state error to zero for a step input. Hence the overall system with the PID controller will be as: f) Find the loop gain for the PID-compensated system and analyze the system to be sure that all requirements have been met, you need to find: a) Step response of the PID-compensated system with the found value of in S). b) Compare step response for uncompensated system and PID-compensated system. c) Compare the peak time for uncompensated system and PID-compensated system. d) Compare the steady-state error for uncompensated system and PID-compensated system. 1. Discuss and conclude the results obtained.