Home /
Expert Answers /
Mechanical Engineering /
in-this-rrr-three-revolutes-3dof-robot-attach-the-link-coordinate-frames-while-showing-on-the-f-pa934
(Solved): In this RRR (three revolutes 3dof) Robot, attach the link /coordinate frames while showing on the f ...
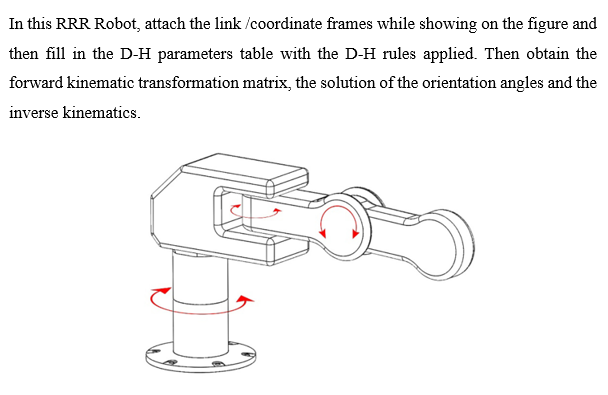
In this RRR (three revolutes 3dof) Robot, attach the link /coordinate frames while showing on the figure and then fill in the D-H parameters table with the D-H rules applied. Then obtain the forward kinematic transformation matrix, the solution of the orientation angles and the inverse kinematics.