Home /
Expert Answers /
Other Math /
please-use-matlab-a-four-bar-linkage-system-is-shown-below-the-first-link-a-is-an-input-link-cr-pa701
(Solved): Please use matlab A four-bar linkage system is shown below. The first link, a, is an input link (cr ...
Please use matlab
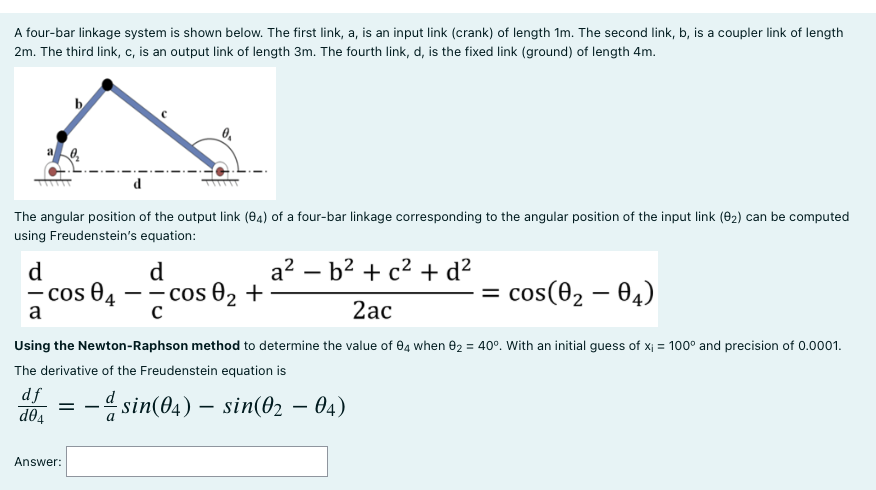
A four-bar linkage system is shown below. The first link, a, is an input link (crank) of length \( 1 \mathrm{~m} \). The second link, b, is a coupler link of length \( 2 \mathrm{~m} \). The third link, c, is an output link of length \( 3 \mathrm{~m} \). The fourth link, \( \mathrm{d} \), is the fixed link (ground) of length \( 4 \mathrm{~m} \). The angular position of the output link \( \left(\theta_{4}\right) \) of a four-bar linkage corresponding to the angular position of the input link ( \( \left.\theta_{2}\right) \) can be computed using Freudenstein's equation: \[ \frac{\mathrm{d}}{\mathrm{a}} \cos \theta_{4}-\frac{\mathrm{d}}{\mathrm{c}} \cos \theta_{2}+\frac{\mathrm{a}^{2}-\mathrm{b}^{2}+\mathrm{c}^{2}+\mathrm{d}^{2}}{2 \mathrm{ac}}=\cos \left(\theta_{2}-\theta_{4}\right) \] Using the Newton-Raphson method to determine the value of \( \theta_{4} \) when \( \theta_{2}=40^{\circ} \). With an initial guess of \( x_{i}=100^{\circ} \) and precision of \( 0.0001 \). The derivative of the Freudenstein equation is \[ \frac{d f}{d \theta_{4}}=-\frac{d}{a} \sin \left(\theta_{4}\right)-\sin \left(\theta_{2}-\theta_{4}\right) \] Answer:
Expert Answer
clear ; clc ; close all a=1; b=2; c=3; d=4; the_2=40; %in degree the_2_ra=the_2*pi/180; % in radian syms f(x) f(x)= (d/a)*cos(x)-(d/c)*cos(the_2_ra)+(a^2-b^2+c^2+d^2)/(2*a*c)-cos(the_2_ra-x); %function where x refers to theta_4 x0=(100*pi/180); % i