Home /
Expert Answers /
Electrical Engineering /
q1-the-first-three-links-of-a-revolute-joint-robot-manipulator-are-shown-in-figure-q1-the-lengths-pa145
(Solved): Q1 The first three links of a revolute joint robot manipulator are shown in Figure Q1. The lengths ...
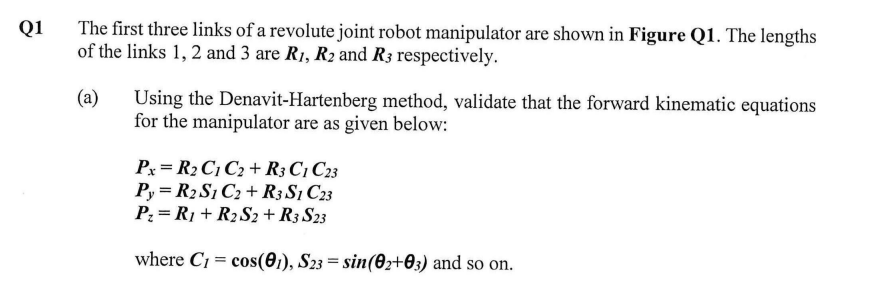
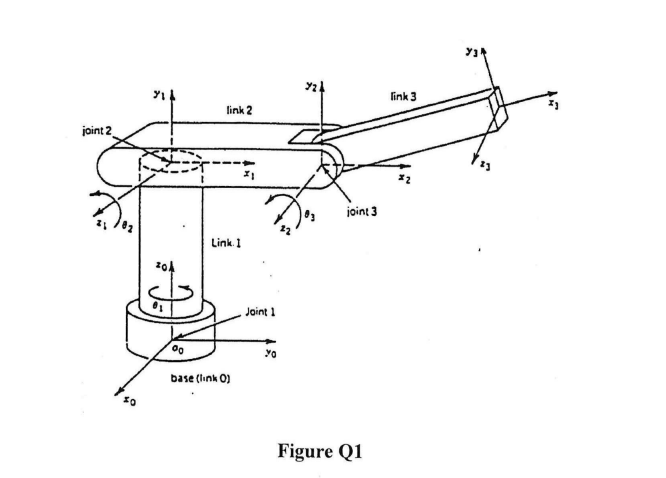
Q1 The first three links of a revolute joint robot manipulator are shown in Figure Q1. The lengths of the links 1, 2 and 3 are R?, R? and R3 respectively. (a) Using the Denavit-Hartenberg method, validate that the forward kinematic equations for the manipulator are as given below: Px=R2 C1 C2+ R3 C1 C23 Py=R2 S1 C2 + R3 S1 C23 P?=R1+R2 S2+R3 S23 where C? = cos(01), S23= sin(02+03) and so on.
joint 2 ??? 204 link 2 Link. I 00 base (link 0) Joint 1 Yo 724 joint 3 Figure Q1 link 3