Home /
Expert Answers /
Electrical Engineering /
ram-for-a-linear-control-system-is-shown-in-fig-it-the-steady-state-r-to-a-ramp-input-as-nction-of-pa478
(Solved): ram for a linear control system is shown in Fig, it the steady state r to a ramp input as nction of ...
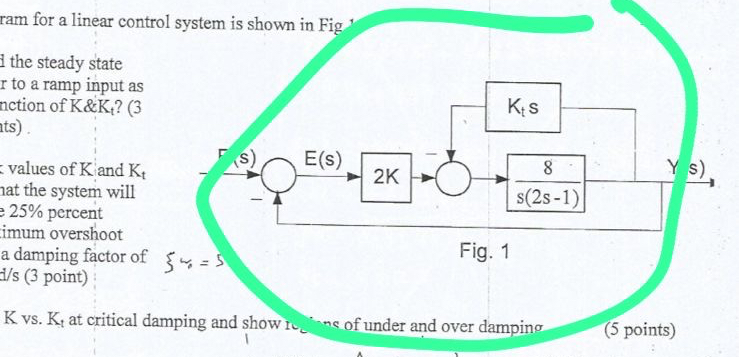
ram for a linear control system is shown in Fig, it the steady state
rto a ramp input as nction of
K_(2)K_(t)? ( 3 ts) values of
K_(and )K_(t)at the system will
25%percent imum overshoot a damping factor of point