Home /
Expert Answers /
Electrical Engineering /
tel306-05-control-systems-assignment-2-lab-exercise-4-robotic-arm-simulations-robotic-arms-are-c-pa228
(Solved): TEL306/05 Control Systems Assignment 2 Lab Exercise 4 - Robotic Arm Simulations Robotic arms are c ...
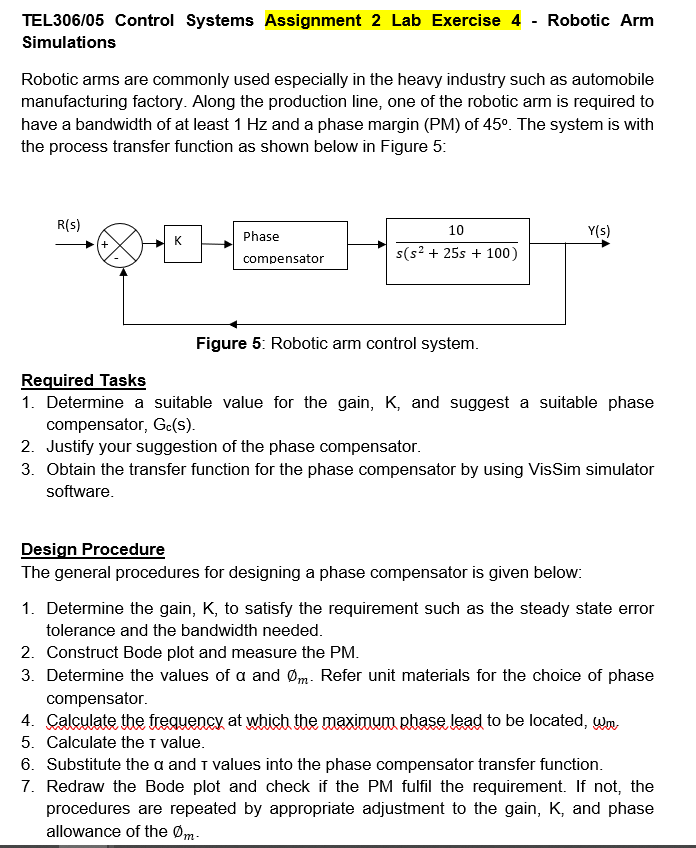
TEL306/05 Control Systems Assignment 2 Lab Exercise 4 - Robotic Arm Simulations Robotic arms are commonly used especially in the heavy industry such as automobile manufacturing factory. Along the production line, one of the robotic arm is required to have a bandwidth of at least 1 Hz and a phase margin (PM) of 45°. The system is with the process transfer function as shown below in Figure 5: R(S) 10 Y(s) K Phase + s(s² + 25s + 100) compensator Figure 5: Robotic arm control system. Required Tasks 1. Determine a suitable value for the gain, K, and suggest a suitable phase compensator, Gc(s). 2. Justify your suggestion of the phase compensator. 3. Obtain the transfer function for the phase compensator by using VisSim simulator software. Design Procedure The general procedures for designing a phase compensator is given below: 1. Determine the gain, K, to satisfy the requirement such as the steady state error tolerance and the bandwidth needed. 2. Construct Bode plot and measure the PM. 3. Determine the values of a and Øm. Refer unit materials for the choice of phase compensator. 4. Calculate the frequency at which the maximum phase lead to be located, wm 5. Calculate the T value. 6. Substitute the a and T values into the phase compensator transfer function. 7. Redraw the Bode plot and check if the PM fulfil the requirement. If not, the procedures are repeated by appropriate adjustment to the gain, K, and phase allowance of the Øm-