Home /
Expert Answers /
Electrical Engineering /
the-equation-of-motion-in-terms-of-angular-speed-of-the-spinning-disc-represented-in-figure-q4-s-pa469
(Solved): The equation of motion in terms of angular speed of the spinning disc (represented in figure Q4). s ...
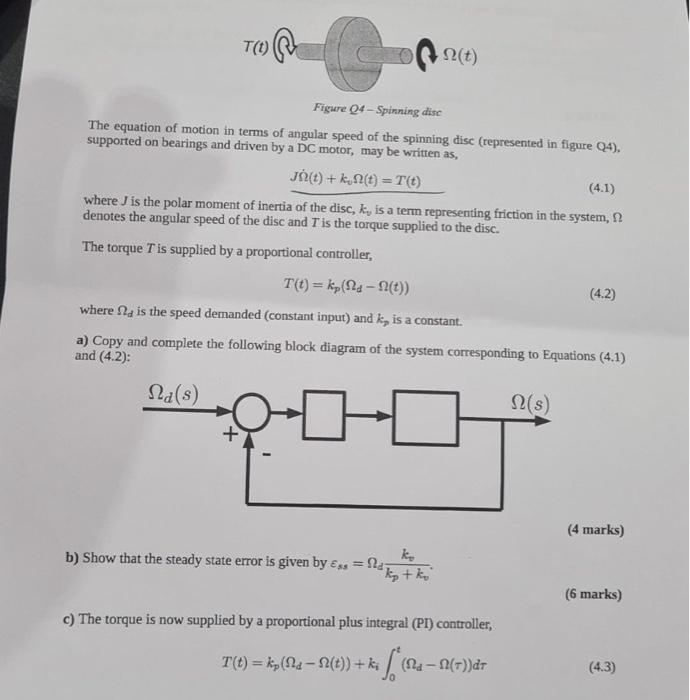
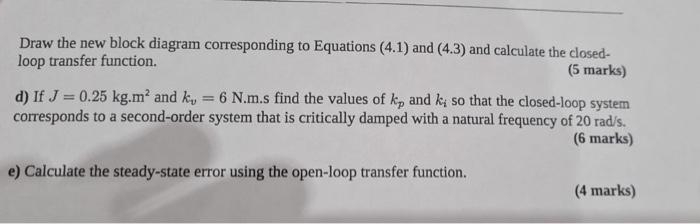
The equation of motion in terms of angular speed of the spinning disc (represented in figure Q4). supported on bearings and driven by a DC motor, may be written as, \[ J \dot{\Omega}(t)+k_{u} \Omega(t)=T(t) \] where \( J \) is the polar moment of inertia of the disc, \( k_{y} \) is a term representing friction in the system, \( \Omega \) denotes the angular speed of the disc and \( T \) is the torque supplied to the disc. The torque \( T \) is supplied by a proportional controller, \[ T(t)=k_{p}\left(\Omega_{d}-\Omega(t)\right) \] where \( \Omega_{d} \) is the speed demanded (constant input) and \( k_{p} \) is a constant. a) Copy and complete the following block diagram of the system corresponding to Equations (4.1) and (4.2): (4 marks) b) Show that the steady state error is given by \( \varepsilon_{s s}=\Omega_{d} \frac{k_{v}}{k_{p}+k_{v}} \). (6 marks) c) The torque is now supplied by a proportional plus integral (PI) controller, \[ T(t)=k_{p}\left(\Omega_{d}-\Omega(t)\right)+k_{i} \int_{0}^{t}\left(\Omega_{d}-\Omega(\tau)\right) d \tau \]
Draw the new block diagram corresponding to Equations (4.1) and (4.3) and calculate the closedloop transfer function. ( 5 marks) d) If \( J=0.25 \mathrm{~kg} \cdot \mathrm{m}^{2} \) and \( k_{v}=6 \) N.m.s find the values of \( k_{p} \) and \( k_{i} \) so that the closed-loop system corresponds to a second-order system that is critically damped with a natural frequency of \( 20 \mathrm{rad} / \mathrm{s} \). (6 marks) e) Calculate the steady-state error using the open-loop transfer function. (4 marks)